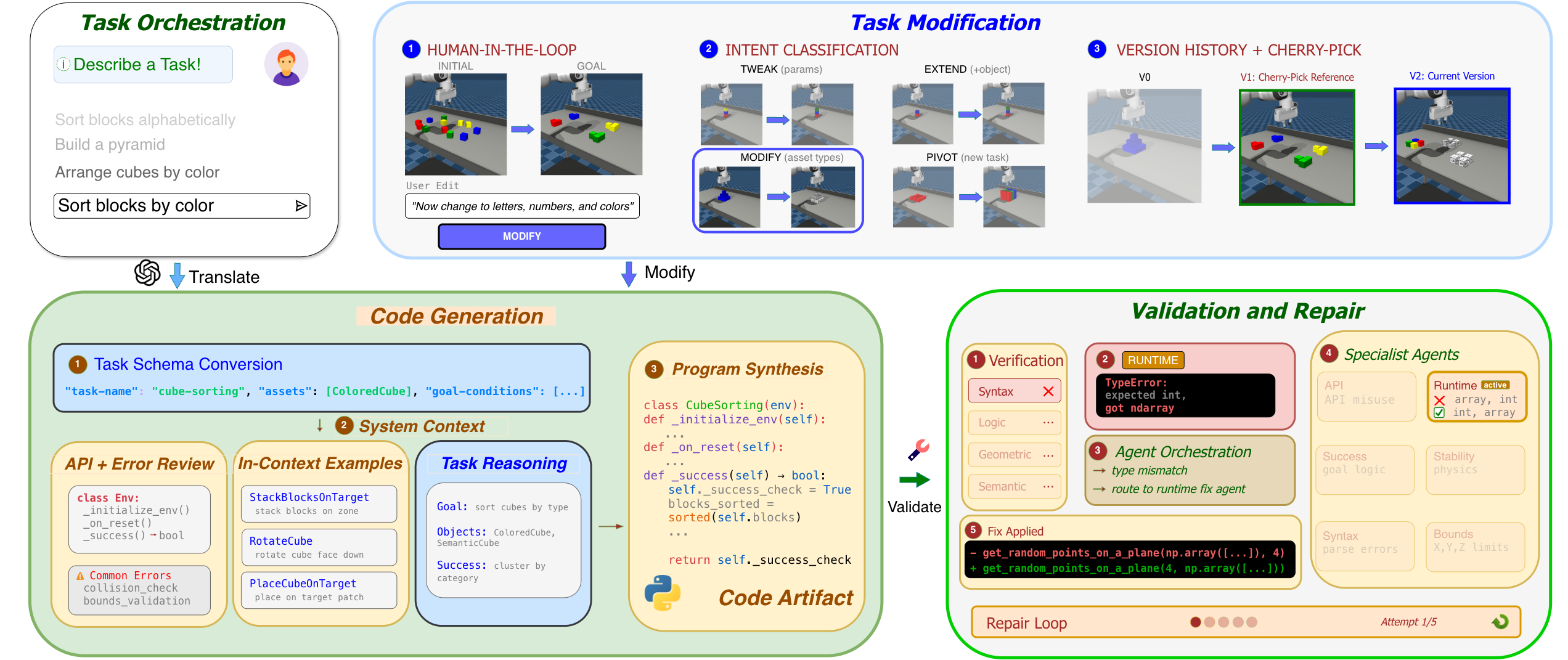
Fixed benchmarks. Limited tasks.
What if anyone could create them?
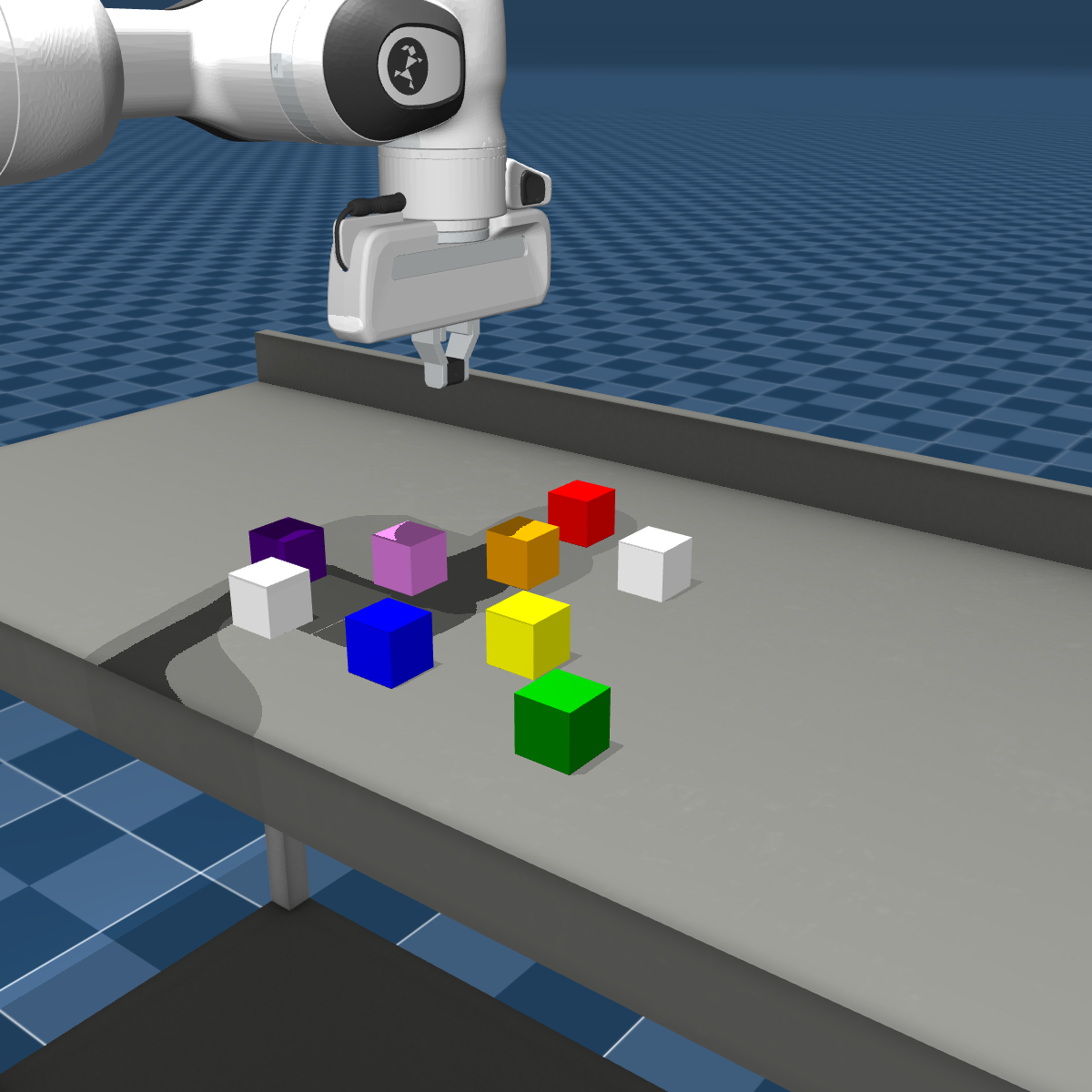
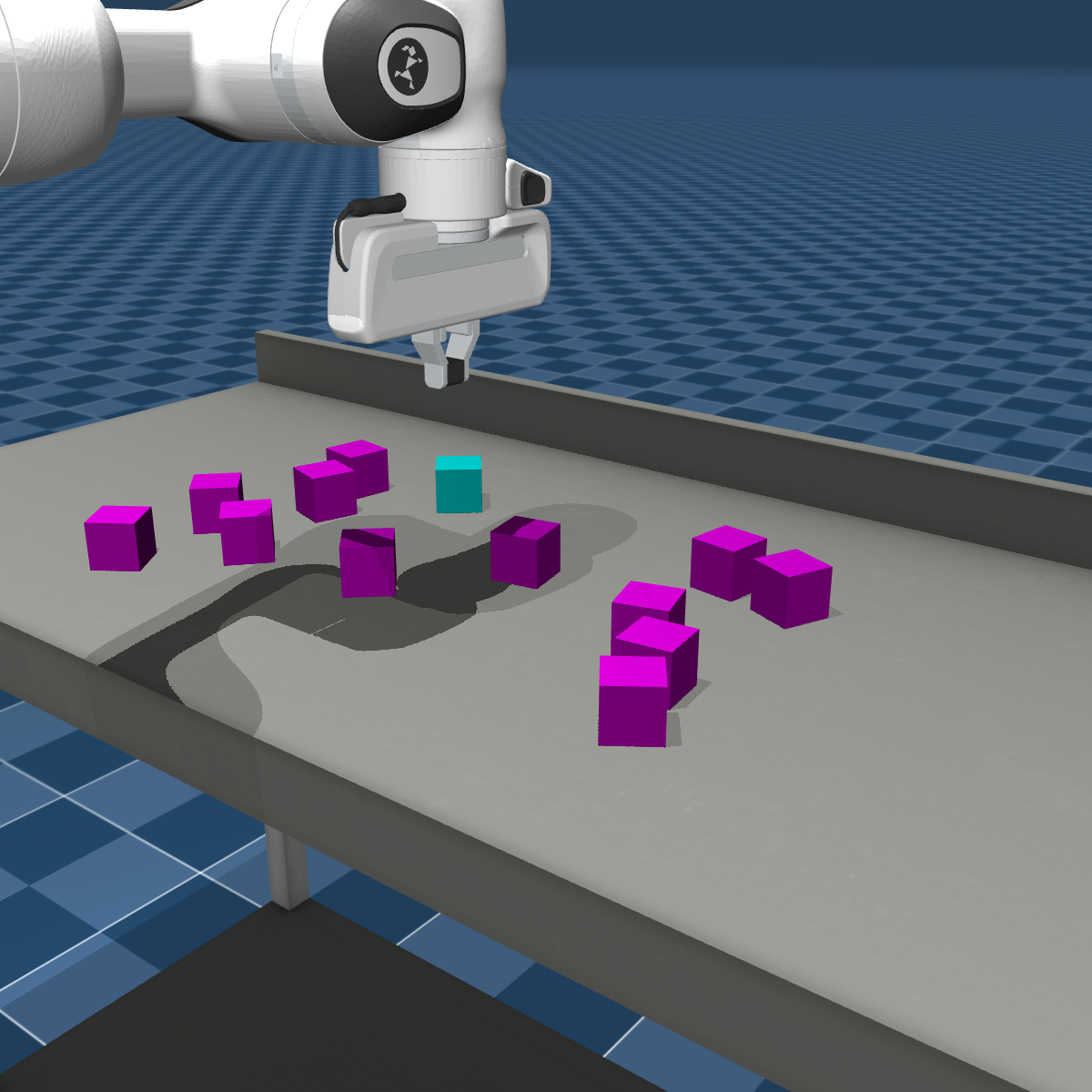
Sort colored cubes into distinct piles by color
Generating ColorBlockPileSorting...
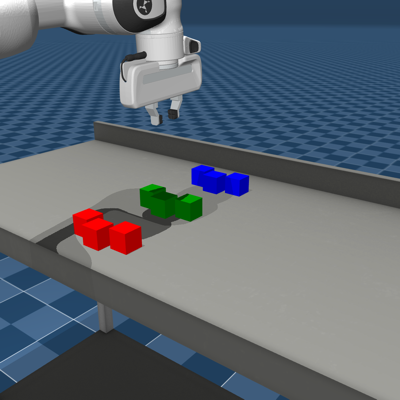
Task compiled. 9 ColoredCubes (3 red, 3 green, 3 blue) spawn in a mixed pile. Success requires compact same-color groups.
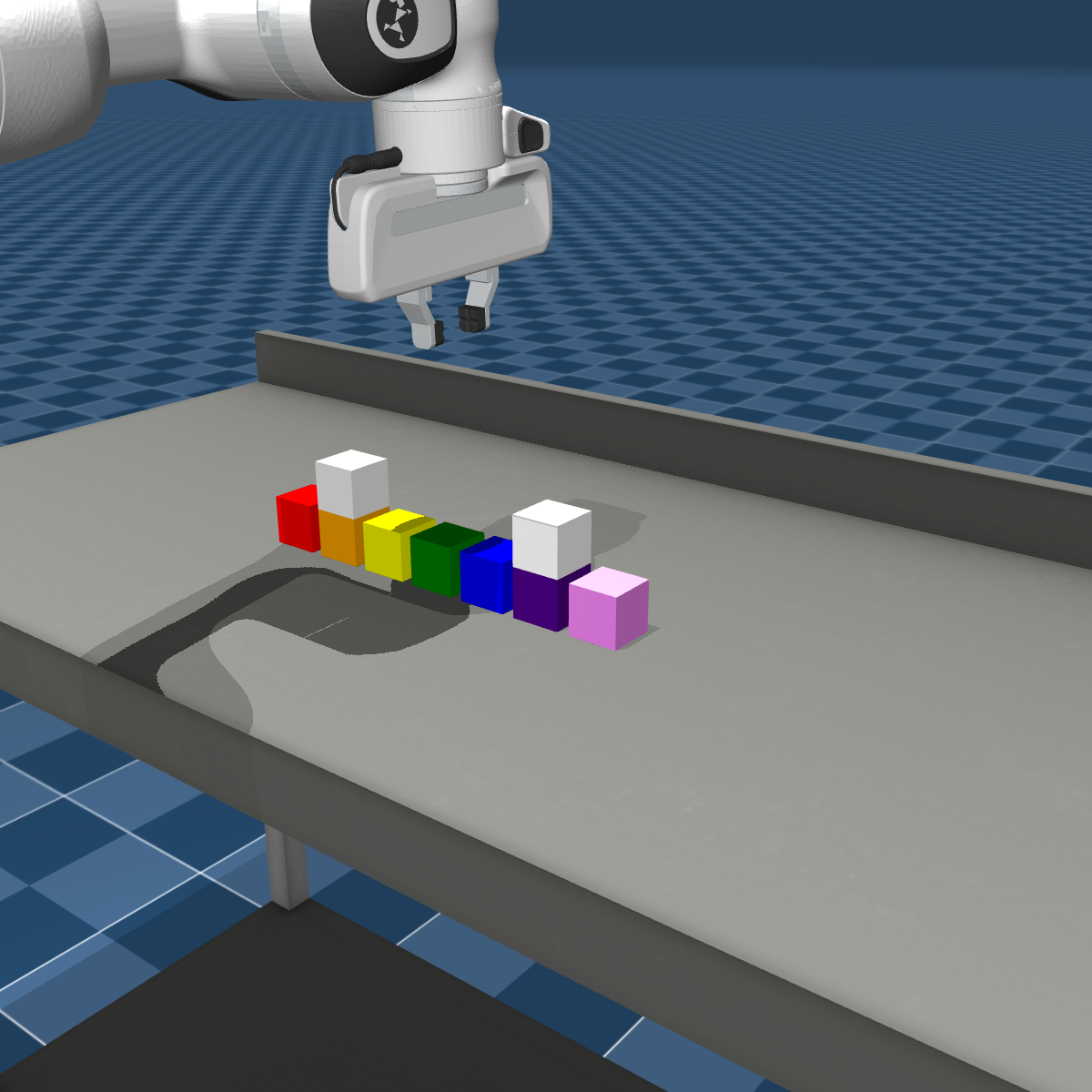
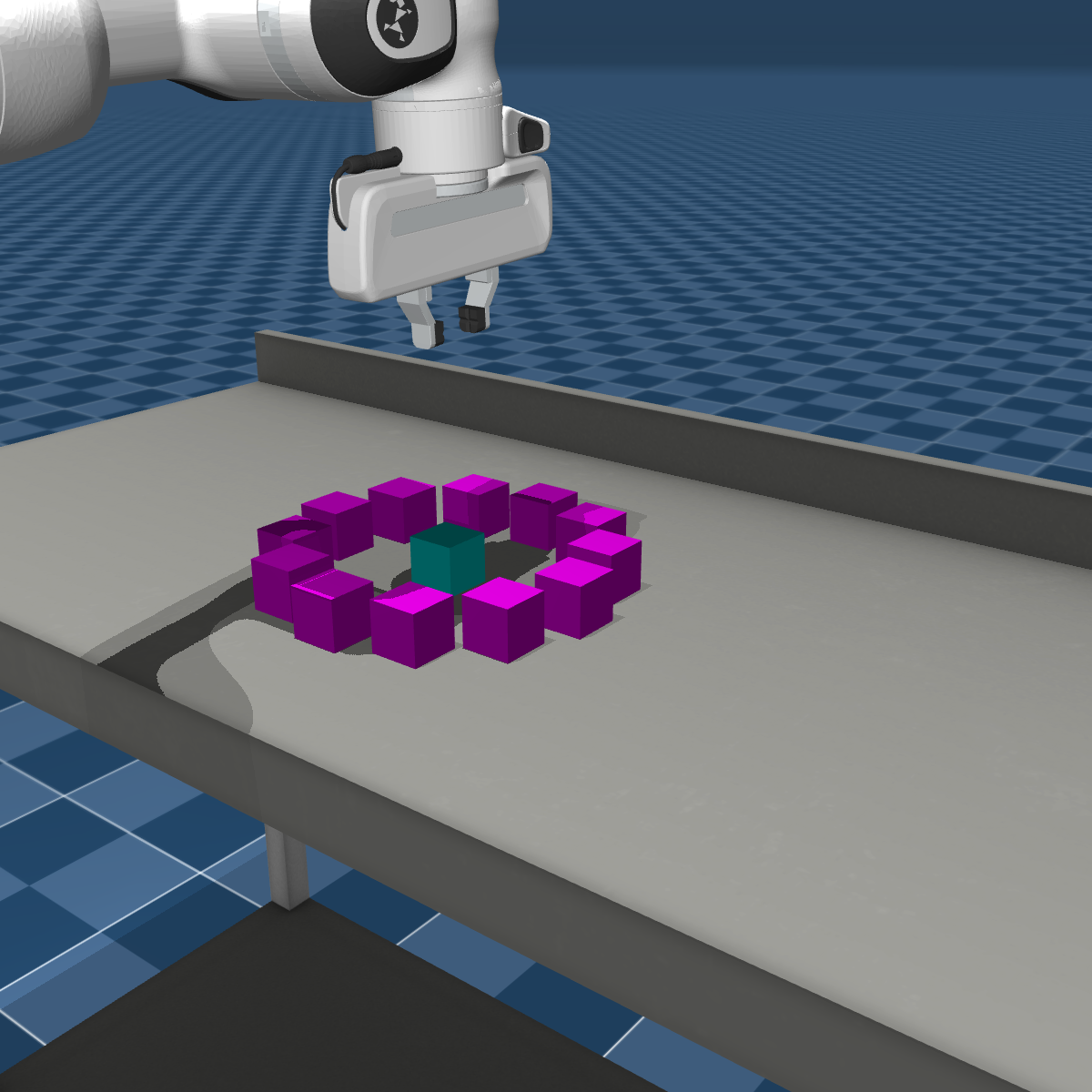
 Goal state snapshot — validated ✔
Goal state snapshot — validated ✔
Goal state snapshot — validated ✔
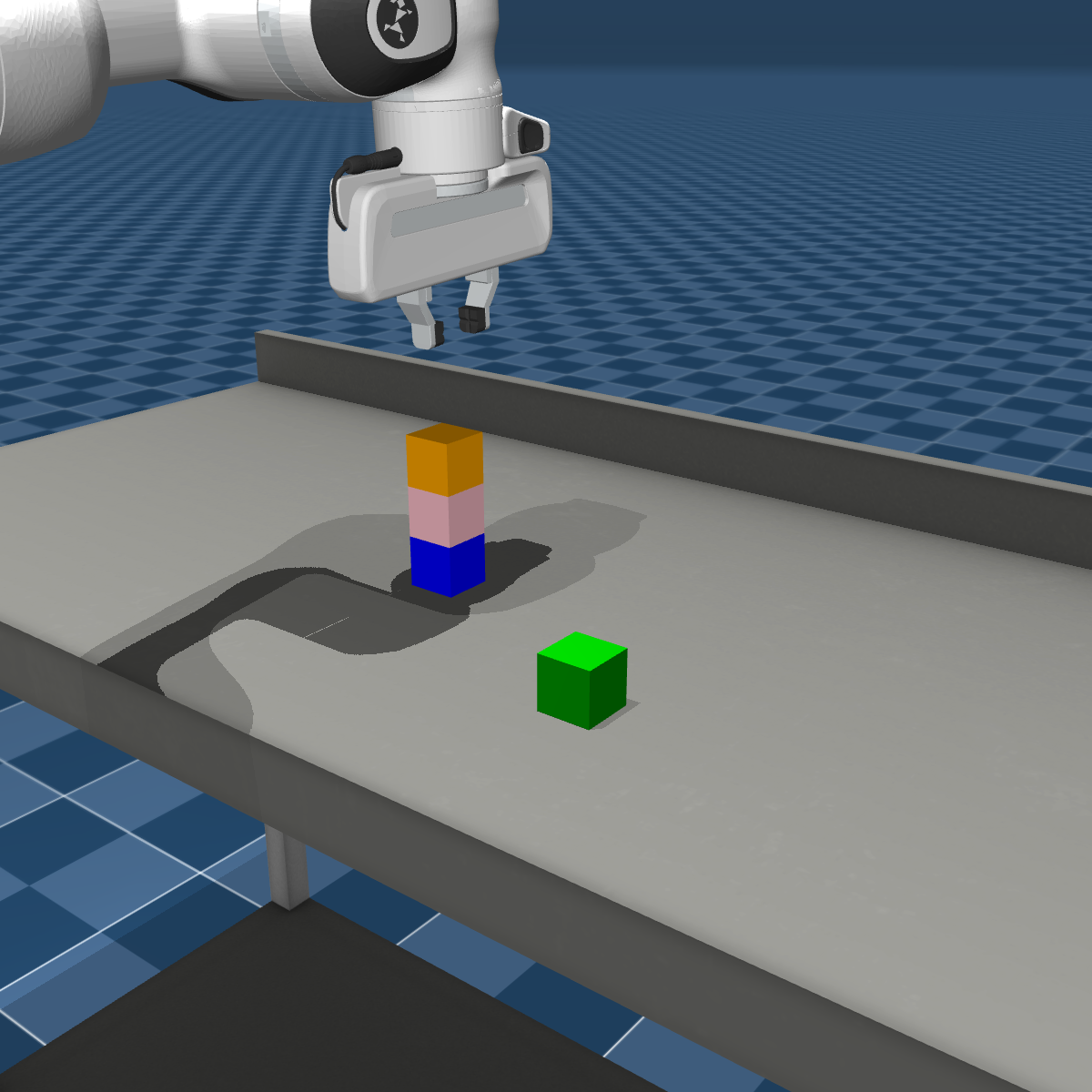
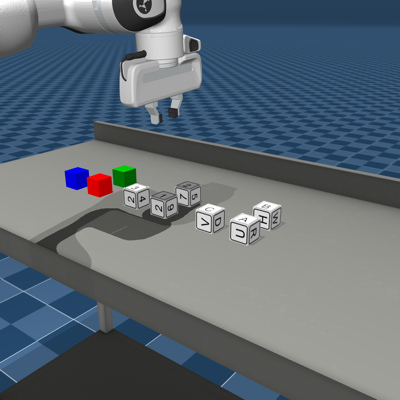
Now add numbered and lettered blocks — sort by type
Modifying task... Adding SemanticCube assets...
Task updated. 3 ColoredCubes + 3 numbered + 3 lettered SemanticCubes. Three type‑sorted piles with semantic readability checks.
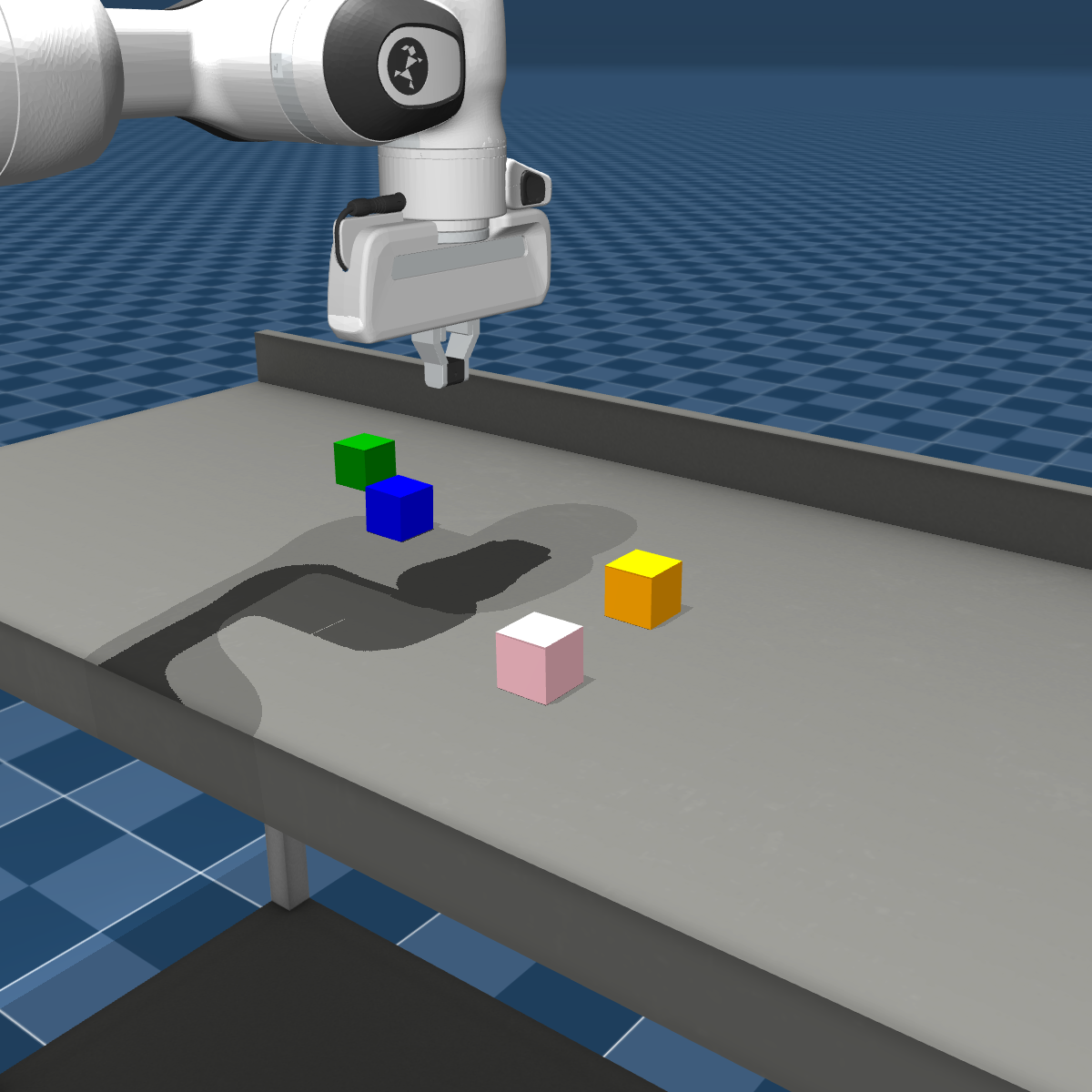
 Goal state snapshot — validated ✔
Goal state snapshot — validated ✔
Goal state snapshot — validated ✔
generated_task.py
class ColorBlockPileSorting(RoboEvalEnv):
"""Sort colored cubes into
distinct piles by color."""
_GROUP_MAX_DIST = 0.12
_MIN_SEPARATION = 0.18
def _initialize_env(self):
self.table = self._preset.get_props(Table)[0]
self.red_cubes = [ColoredCube(self._mojo) for _ in range(3)]
self.green_cubes = [ColoredCube(self._mojo) for _ in range(3)]
self.blue_cubes = [ColoredCube(self._mojo) for _ in range(3)]
self.cubes = self.red_cubes + self.green_cubes + self.blue_cubes
for c in self.red_cubes:
c.set_color("red")
for c in self.green_cubes:
c.set_color("green")
for c in self.blue_cubes:
c.set_color("blue")
def _on_reset(self):
rng = np.random.default_rng(self.seed)
center = np.array([0.55, 0.00])
for cube in self.cubes:
xy = center + rng.normal(scale=0.035, size=(2,))
cube.set_pose(position=np.array([*xy, 0.97]))
def _success(self):
red_spread = self._max_pairwise(self.red_cubes)
green_spread = self._max_pairwise(self.green_cubes)
blue_spread = self._max_pairwise(self.blue_cubes)
compact = all(s <= self._GROUP_MAX_DIST
for s in [red_spread, green_spread, blue_spread])
r_c = self._centroid(self.red_cubes)
g_c = self._centroid(self.green_cubes)
b_c = self._centroid(self.blue_cubes)
ordered = r_c[0] < g_c[0] < b_c[0]
return compact and ordered